| 当前位置:首页 > 机器人底盘知识 |
四转四驱移动机器人底盘-结构简单 控制灵活 模式多 |
| 来源:煜禾森机器人 时间:2023/8/7 |
| 由于运动控制方式的不同,四转四驱移动机器人在柔性控制能力上相比四轮差速有着巨大的优势。特别是在智能化老年出行机器人开发与工业特种场景的巡检机器人开发上就显得格外重要。 四转四驱在结构上相比四轮差动有什么区别? 1 结构更简单,更紧凑在结构上,四轮差速结构是以电机左右差动为转向动力源,动力从电机输出之后,经过减速机最后分别输送至左右侧前后轴最终到达车轮。因为部分四轮差动结构为保证机器人在原地旋转与左右转向时候输出动力,需具有减速器排布,造成四轮差动机器人内部空间排布相对紧张或整体结构体积较重 。
而四转四驱结构,省去了减速机这些部件,电机动力直接转化为驱动动力,转向机构则由单独的电机进行控制,结构上要更简单、紧凑,零部件数量更少。更少的零配件,更简单的结构,因此在控制效率上,四转四驱相比四轮差速的结构有着先天的优势,同时更少的零件让整个四驱系统的故障率也会更低,稳定性上要更高。 2 控制方式更灵活传统的移动机器人驱动方式,大体可以分为两轮差速带万向轮、两轮差速带同步轮、四轮差速移动机器人这几种形式,这些移动机器人运动形式所擅长的场景各有不同,对于操控、负载能力与运行可靠性能力都有着不同的影响。 差速结构移动机器人由于左右两边速度差形成的转向方式,实际运行中,由于地面摩擦力的问题,可能会出现位置漂移,控制精度差,对于需要需要精准定位的应用场景探索与开发稍显不足 。 这几种形式也受制于移动机器人本身的成本和机械结构,导致减速机与结构实用寿命有限,因此差速类型移动机器人在工业与消费类移动机器人应用中需要持续稳定的运行上存在着天生的短板,维护周期较短。 相比四轮差速结构,四转四驱移动机器人系统更像是以软件为主导的动力四驱系统,可以依靠软件定义不同的模式,或者系统根据工况自行调节,在操作难度上更低,更加智能化 。 同时具有独立驱动,独立转向,独立悬挂的结构设计,具有优越的通过性和越野性。针对转向做了加速度规划,按照阿克曼柔性曲线进行差补,转向更丝滑。控制机动灵活,不弹跳,不偏移,满足高精度要求运行,全面应用于室内外多种场景下的巡检、科研等开发应用需求 。 3 运动模式多样四轮差速只有一种差速转向的运动模式,主要是靠滑动转向,相比于滚动摩擦,滑动摩擦对轮胎的损耗极大,尤其是在水泥等硬质路面,四轮差速机器人在水泥路面极易留下轮胎磨痕。虽然可以实现原地转向,小巧灵活等优点,但同时导致轮胎与配件损耗较大,无法满足长时间稳定运行的应用需求。
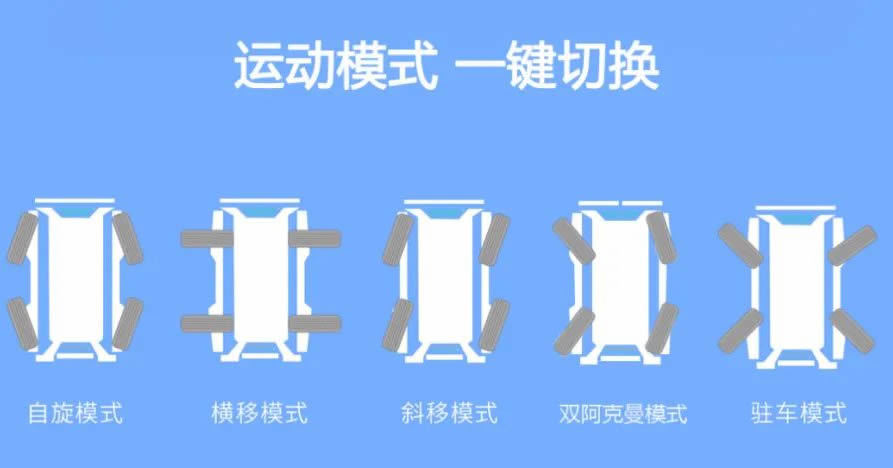
四转四驱多模态运动模式 四转四驱结构则拥有多种运动模式,双阿克曼模式可实现+∞到-∞的转弯半径,让您纵享“丝滑”转向曲线;斜移模式可实现-90°到+90°转向,高速转向时通过降低车身横摆角速度,有效抑制车身发生动态侧偏的倾向,保障车身灵活、稳定、快速通过特定狭小区域,拓展机器人狭小空间应用场景;通过运动学和动力学设计,“X”形驻车,可长时间保持驻车状态,不损耗电机,提升电机效能,关机状态下维持坡道驻车,不溜车不滑坡,多层高效安全防护。完整的系统架构设计与一流的驱动管理算法,精准控制,加载20多项安全保护策略,保障整车的运行稳定与精度。
|
| 信息推荐 |
| 机器人底盘 |
| 水滴2系列机器人底盘 |
| 云海系列机器人底盘 |
| 近期动态 |