





 地毯材质
 水泥地面
 地板材质
 瓷砖地面
|
资质认证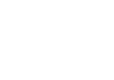 FCC认证
 EMC认证
 CE认证
 CR认证
|
| 整机尺寸 | 高 280mm * 直径 505mm |
| 机体重量 | 45kg |
| 载重能力 | 50kg |
| 通过能力 | 过坎能力 18mm 爬坡角度 10度 |
| 空载续航 | 11小时 |
| 行进速度 | 默认1m/s 最大1.2m/s |
| 运动参数 | 旋转半径 252.5mm |
| 电源配置 | 18650锂电池组(25.2V 20Ah) |
| 充电时间 | 4-5小时 |
| 轮组配置 | 六轮(2个驱动轮+4个万向轮+2辅助轮) |
| 差速驱动+主动悬挂 200W轮毂伺服电机*2 | |
| 传感器配置 | 激光测距传感器, RGBD深度摄像头,双向视觉 |
| 超声波测距传感器,IMU六轴姿态传感器, | |
| 防撞传感器,俯视摄像头(高配) | |
| 网络接口 | 有线接口 Ethernet(100M) 无线接口 Wi-Fi |
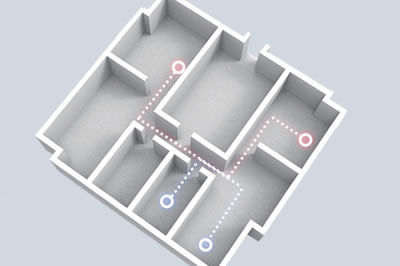
| 扫图建图 | 一次性建图5万m² 最大运行面积8万m² |
| 主控计算力 | Linux 架构(Intel J1900 四核 2.0Ghz) |
| 整机尺寸 | 长 510mm*宽 510mm* 高 280mm |
| 机体重量 | 45kg |
| 载重能力 | 50kg |
| 通过能力 | 过坎能力 18mm 爬坡角度 10度 |
| 空载续航 | 11小时 |
| 行进速度 | 默认1m/s 最大1.2m/s |
| 运动参数 | 旋转半径 252.5mm |
| 电源配置 | 18650锂电池组(25.2V 20Ah) |
| 充电时间 | 4-5小时 |
| 轮组配置 | 六轮(2个驱动轮+4个万向轮+2辅助轮) |
| 差速驱动+主动悬挂 200W轮毂伺服电机*2 | |
| 传感器配置 | 激光测距传感器, RGBD深度摄像头,双向视觉 |
| 超声波测距传感器,IMU六轴姿态传感器, | |
| 防撞传感器,俯视摄像头(高配) | |
| 网络接口 | 有线接口 Ethernet(100M) 无线接口 Wi-Fi |
| 扫图建图 | 一次性建图5万m² 最大运行面积8万m² |
| 主控计算力 | Linux 架构(Intel J1900 四核 2.0Ghz) |

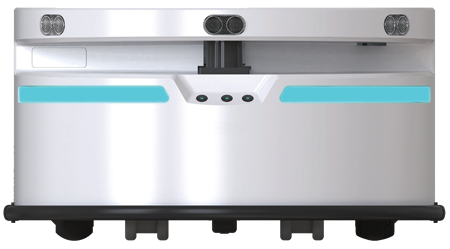
| 整机尺寸 | 高 280mm * 直径 505mm |
| 机体重量 | 45kg |
| 载重能力 | 50kg |
| 通过能力 | 过坎能力 18mm 爬坡角度 10度 |
| 空载续航 | 11小时 |
| 行进速度 | 默认1m/s 最大1.2m/s |
| 运动参数 | 旋转半径 252.5mm |
| 电源配置 | 18650锂电池组(25.2V 20Ah) |
| 充电时间 | 4-5小时 |
| 轮组配置 | 六轮(2个驱动轮+4个万向轮+2辅助轮) |
| 差速驱动+主动悬挂 200W轮毂伺服电机*2 | |
| 传感器配置 | 激光测距传感器, RGBD深度摄像头,双向视觉 |
| 超声波测距传感器,IMU六轴姿态传感器, | |
| 防撞传感器,俯视摄像头(高配) | |
| 网络接口 | 有线接口 Ethernet(100M) 无线接口 Wi-Fi |
| 扫图建图 | 一次性建图5万m² 最大运行面积8万m² |
| 主控计算力 | Linux 架构(Intel J1900 四核 2.0Ghz) |
